Event-based vision technology
Event-based vision is a novel sensing technology that captures only changes in a scene, enabling ultra-fast and energy-efficient perception.
It is designed for applications requiring to distinguish movement from background and reliable operation in challenging conditions such as high speed, low light or high dynamic range, where conventional cameras fail.
Event vision solution
Conventional frame-based cameras struggle in real-world conditions such as fast motion, poor lighting and high contrast environments. These limitations lead to motion blur, missed events, high data rates and increased processing requirement, which are critical bottlenecks in applications like autonomous driving, robotics and industrial inspection.

Severe motion blur with conventional cameras

Precise temporal details with event vision
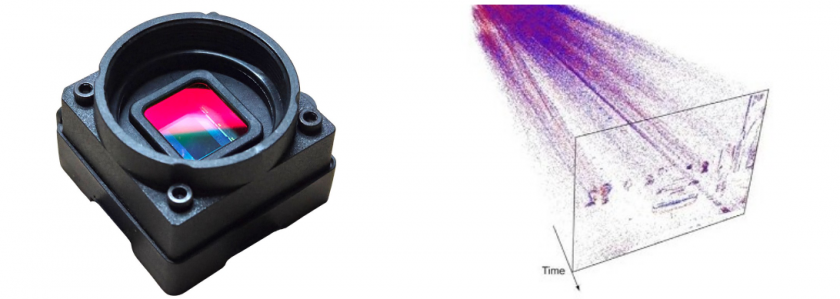
Our solution is built around the Sony IMX636 event sensor, a next-generation imaging technology often referred to as a “silicon retina” due to its bio-inspired operating principle. Unlike conventional cameras that capture full image frames at fixed intervals, the sensor asynchronously detects only changes in brightness at each pixel, producing a continuous stream of events with microsecond temporal resolution.

Stereo event & frame kit
Our solution integrates two synchronized event/RGB sensor pairs into a stereo vision platform with GigE connectivity for reliable high-bandwidth data transmission. Each stereo pair combines the Sony IMX636 event sensor with the Sony IMX265 RGB image sensor, enabling simultaneous acquisition of asynchronous event data and conventional intensity frames. The sensors are precisely synchronized with Precision Time Protocol (PTP) and geometrically aligned, allowing accurate multimodal depth perception, sensor fusion and high-speed scene understanding in real-world environments.
Key advantages:
| Parameter | Conventional Cameras | Our Event Vision System |
| Latency | ~10–30 ms | <1 ms |
| Dynamic Range | ~60 dB | >120 dB |
| Motion Blur | High | None |
| Low-Light Operation | >10 lux | <1 lux |
| Data Efficiency | Low (dense frames) | High (event-driven) |
| Power Consumption | 4-5W (constant) | <2W (event-dependent) |
The technology was developed through Horizon Europe Chips JU projects (ShapeFuture GA nr.: 101139996) with ongoing validation in real-world scenarios (TRL 4–6).
How does the solution work?
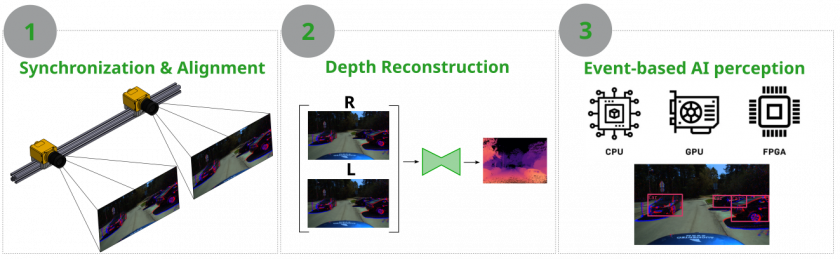
- Synchronized Multimodal Acquisition
Event and RGB stereo cameras capture the scene simultaneously using precisely synchronized and geometrically aligned sensors.
- Stereo Depth Reconstruction
Event and frame data are fused to estimate depth, motion and scene structure in real time.
- Real-Time event-based AI Perception
Embedded AI enables robust object detection, tracking and environment understanding in challenging conditions.
Technical specification
| Parameter | Value / Description |
| Interfaces | M12 Ethernet, M8 Trigger |
| Resolution event/frame | 1280×720/2048×1536 |
| Latency/Throughput | <1ms/40Mev/s |
| Dynamic range | >120dB |
| Synchronization | I/O cable, gPTP IEEE 802.1AS |
| Platform | x86 (Linux, Windows) |
| Power | <2W |
The stereo camera kit features changeable baseline length and lenses for adjustable depth resolution and field-of-view.
Collaboration
We see multiple pathways for technology transfer and industrial collaboration depending on the partner’s needs and application domain:
- The technology can be licensed for integration into existing products and systems, including access to proprietary algorithms, perception pipelines and system integration know-how.
- We are open to collaborative research and contract development projects focused on adapting the technology to specific use cases, performance requirements or hardware platforms. This includes joint development of embedded AI solutions and application-specific sensing platforms.
- For selected cases, transfer or commercialization of intellectual property may also be considered as part of a broader strategic partnership.