
RuM laboratorija izstrādā tehnoloģijas, kas ļauj datorizētām sistēmām uztvert pasauli, to interpretēt, pieņemt lēmumus un rīkoties. Mēs uzskatām, ka robotika, mākslīgā uztvere un mākslīgais intelekts spēlēs arvien lielāku lomu cilvēces attīstībā, gan ikdienas dzīvē, gan industrijā un ekonomikā, gan politikā. EDI RuM mērķis ir kļūt par nozīmīgu spēlētāju šīs nākotnes veidošanā, panākot, ka mūsu rezultāti un izstrādātās tehnoloģijas ir ne tikai novērtēti savā zinātnes jomā, bet arī veicina cilvēku labklājību, drošību un veselību. Ar šādu mērķi, līdz šim laboratorijas tehnoloģijas esam attīstījuši un pielāgojuši dažādiem lietojumiem medicīnas, industrijas, lauksaimniecības un mobilitātes jomās.
Atslēgas vārdi:
- mašīnmācīšanās, dziļie neironu tīkli, sintētiski apmācības dati,
- mākslīgais intelekts – izskaidrojams, ģenerējošs, fizikā balstīts,
- automatizācija, industriālie roboti, reālā laika vadība, mobili roboti,
- iegultā inteliģence un datorredze,
- programmu sintēze.
Laboratorijā darbojas četras grupas – no kurām trīs fokusējas uz dažādiem māklsīgā intelekta tehnoloģiju aspektiem un viena specializējas robotikas pētījumos.
Ph. D. Jāņa Ārenta vadītās robotikas grupas ilgtermiņa mērķi ir vērsti uz to, lai ļautu robotiem efektīvi darboties sarežģītās, nestrukturētās vidēs un netraucēti sadarboties ar cilvēkiem. Lai to sasniegtu, mūsu darbs ir koncentrēts uz autonomas mobilās navigācijas pamata iespēju attīstīšanu nestrukturētās vidēs, kā redzams tādos projektos kā VIZTA, EdgeAI un MOTE, kas pēta datorredzes un citu sensoru modalitāšu izmantošanu uztverei un semantiskai ainas interpretācijai. Galvenais mērķis ir aprīkot robotus ar spēju veikt vispārēja nolūka manipulācijas un mijiedarbību, ko ilustrē mūsu darbs industriālajā manipulācijā TRINITY un IMOCO4.E ietvaros, kā arī mūsu centieni nodrošināt robotu un cilvēku mijiedarbību caur tādiem projektiem kā AI4DI. Tas ietver ne tikai uzlabotu uztveri, bet arī augsta līmeņa spriešanas un uzdevumu izpildes attīstību, kur tādi projekti kā EdgeAI koncentrējas uz dabiskās valodas instrukciju parsēšanu un to pamatošanu vides kontekstā, izmantojot kompaktus, interpretējamus mākslīgā intelekta modeļus. Turklāt mēs esam apņēmušies integrēt uzlabotu uztveri un sensorus, ieskaitot nekonvencionālas modalitātes, ar tādiem projektiem kā MOTE un EdgeAI, kas pielāgo atvērtā tipa semantisko uztveri reālās pasaules apstākļiem un reāllaika ierobežojumiem, ļaujot ātri integrēt jaunus novērojumus un uzdevumam specifisku informācijas ieguvi, piemēram, šķērsojama pamata segmentāciju. Mūsu darbs pēdējos gados, ieskaitot semantiskās ainas interpretācijas (MOTE), dabiskās valodas pamatošanas (EdgeAI) un cilvēku mijiedarbības (AI4DI) attīstību, ir tieši veicinājis šos mērķus, ļaujot robotiem saprast un darboties atvērtās, dinamiskās vidēs. Mēs esam arī koncentrējušies uz uztveres sistēmu izstrādi, kas var efektīvi darboties reālās pasaules apstākļos un reāllaika ierobežojumos, kā parādīts MOTE un EdgeAI, un plānošanas sistēmu izveidi, kas var saprast dabiskās valodas instrukcijas un pamatot tās vidē, izmantojot efektīvus mākslīgā intelekta modeļus, kas ir EdgeAI galvenais aspekts. Ar šiem nepārtrauktajiem centieniem mēs veidojam nākotni, kurā roboti var darboties autonomi un sadarbīgi plašā sarežģītu reālās pasaules scenāriju klāstā.
Dr. sc. comp. Kaspara Sudara grupas mērķi ir izstrādāt labāku mākslīgu intelektu, kas vestu pie zinātniskās izcilības, kā arī izstrādāt mākslīgajā intelektā balstītu tehnoloģiju, kas vestu pie komercializācijas iespējām. Galvenā grupas tēma ir izskaidrojošais mākslīgais intelekts un tā metodes. Šajā virzienā grupa pēta fundamentālos mākslīgā intelekta modeļus viedo sistēmu izstrādei un izmanto izskaidrojamo mākslīgo intelektu, lai identificētu atbilstošās datu iezīmes, kas ir atbildīgas par mākslīgā intelekta lēmumu pieņemšanu. Izskaidrojam MI ir īpaši svarīgi veselības aprūpes lietojumos, par kuriem grupa ir veikusi nacionālo grantu projektus OSTAK un LU-AIDA. Tāpat grupa arī veic dziļo neironu tīklu modeļu apmācību dažādu nozaru lietišķajos pielietojumos ar augstu tehnoloģijas gatavības līmeni (TRL).



Dr. sc. comp. Kārļa Freivalda vadītās grupas vispārējais zinātniskais virziens ir mašīnmācīšanās(ML)/mākslīgais intelekts (MI). Papildvirziens arī dažādu matemātisku algoritmu radīšana un pielietošana un inovarīvu ierīču radīšana, uz matematāsku algoritmu pamata. Svarīgākais pielietojums šobrīd ir robotikā, piemēram starptautiska projeka AIMS5.0 ietvaros. Papildus grupa darbojas ar fundamentālām mākslīgā intelekta tēmām – fizikā balstīts MI un preogrammu sintēze.
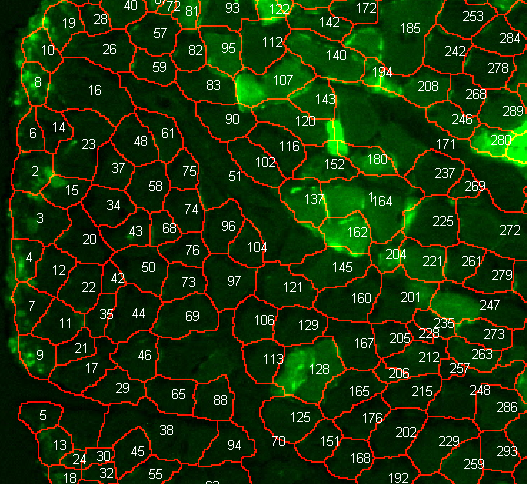
Laboratorijas vadītāja Dr. sc. ing. Roberta Kadiķa grupa darbojas ar datorredzes uzdevumu (objektu detektēšana, attēlu klasificēšana un segmentēšana) risināšanu gan ar mašīnmācīšanās metodēm, gan ar klasiskām attēlu apstrādes pieejām. Būtiska pētniecības joma ir ģenerējošais MI (ģenerējošie tīkli-pretinieki, difūzijas modeļi), kuru lietojam sintētisku apmācības datu ģenerēšanai. Piemēram, ERAF projekta AimOOC ietvaros ģenerējošais MI tika lietots uz čipa kultivētu orgānu attēlu sintēzei, lai ar tiem apmācītu attēlu klasifikatorus kultivēšanas procesa automatizēšanai. Grupa aktīvi meklē aizvien jaunus lietojumus ģenerējošam MI, nonākot pie tādiem risinājumiem, kā, piemēram, virtuāla medicīnas attēlu iekrāsošana (LZP projekts HAVeT-AI). Modeļi, kuru uztveres spējas uzlabotas ar dažādām datu sintēzes un datu paplašināšanas metodēm tālāk tiek pielietoti gan mobilās sistēmās (projekti COMP4DRONES, Augmented CCAM), gan industrijas robotu sistēmās (VIZTA IMOCO4.E), gan medicīnas attēlu analīzei.


Nesenie projekti
-
 Izskaidrojama mākslīgā intelekta sistēma kaulu metastāžu identificēšanai datortomogrāfijā un magnētiskās rezonanses izmeklējamos (A.I.B.M.)
Izskaidrojama mākslīgā intelekta sistēma kaulu metastāžu identificēšanai datortomogrāfijā un magnētiskās rezonanses izmeklējamos (A.I.B.M.)
-
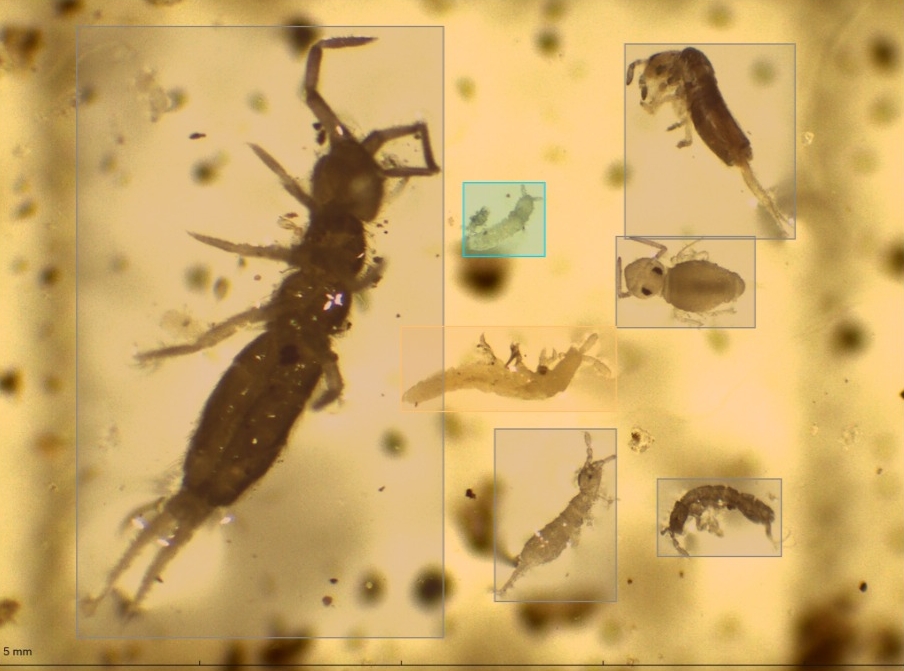
Augsnes bioloģiskā indeksa (QBS) noteikšana, izmantojot mašīnmācīšanos (QBS) #LZP FLPP
-
 Mākslīgais intelekts ražošanā, kas veicina ilgtspējību un industriju 5.0 (AIMS5.0) #ChipsJU
Mākslīgais intelekts ražošanā, kas veicina ilgtspējību un industriju 5.0 (AIMS5.0) #ChipsJU
-
 Uz hologrāfisko mikroskopiju un mākslīgo intelektu balstīta nākošās paaudzes citoloģija digitālai patoloģiju diagnostikai veterinārmedicīnā (VetCyto) #ChipsJU
Uz hologrāfisko mikroskopiju un mākslīgo intelektu balstīta nākošās paaudzes citoloģija digitālai patoloģiju diagnostikai veterinārmedicīnā (VetCyto) #ChipsJU
-
 Veterināro audzēju ķirurģisko robežu histoloģiskā atpazīšana un analīze, izmantojot mākslīgo intelektu un multimodālo attēlveidošanu (HAVeT-AI) #ChipsJU
Veterināro audzēju ķirurģisko robežu histoloģiskā atpazīšana un analīze, izmantojot mākslīgo intelektu un multimodālo attēlveidošanu (HAVeT-AI) #ChipsJU
-
 Fiziskās un digitālās infrastruktūras paplašināšana un novērtēšana CCAM izvietošanai (AUGMENTED CCAM) #Horizon Europe
Fiziskās un digitālās infrastruktūras paplašināšana un novērtēšana CCAM izvietošanai (AUGMENTED CCAM) #Horizon Europe
-
 Periferiālā mākslīgā intelekta tehnoloģijas optimizētai iegultās apstrādes veiktspējai (EdgeAI) #ChipsJU
Periferiālā mākslīgā intelekta tehnoloģijas optimizētai iegultās apstrādes veiktspējai (EdgeAI) #ChipsJU
-
 Dziļās mašīnmācīšanās pieeja osteoporozes atpazīšanai ar konusa staru datortomogrāfiju (OSTAK) #ChipsJU
Dziļās mašīnmācīšanās pieeja osteoporozes atpazīšanai ar konusa staru datortomogrāfiju (OSTAK) #ChipsJU
-
 Orgānu uz čipa kultivēšana ar mākslīgā intelekta metodēm personalizētas medicīnas nolūkos. (AimOOC) #ChipsJU
Orgānu uz čipa kultivēšana ar mākslīgā intelekta metodēm personalizētas medicīnas nolūkos. (AimOOC) #ChipsJU
-
 Jauna tehnoloģija ūdeņraža ražošanai no atjaunojamajiem enerģijas resursiem, balstoties uz mākslīga intelekta vadītu izmaksu samazināšanu (HydroG(re)EnergY-Env) #ChipsJU
Jauna tehnoloģija ūdeņraža ražošanai no atjaunojamajiem enerģijas resursiem, balstoties uz mākslīga intelekta vadītu izmaksu samazināšanu (HydroG(re)EnergY-Env) #ChipsJU
Publikācijas
- Sudars, K., Namatevs, I., Nikulins, A., & Ozols, K. (2025). Privacy Auditing of Lithium-Ion Battery Ageing Model by Recovering Time-Series Data Using Gradient Inversion Attack in Federated Learning. Applied Sciences, 15(10), 5704.
- Tomass Zutis, Peteris Racinskis, Anzelika Bureka, Janis Judvaitis, Janis Arents, and Modris Greitans. Multi-Step Object Re-Identification on Edge Devices: A Pipeline for Vehicle Re-Identification.
- Fišere, I.; Edelmers, E.; Svirskis, Š.; Groma, V. Utilisation of Deep Neural Networks for Estimation of Cajal Cells in the Anal Canal Wall of Patients with Advanced Haemorrhoidal Disease Treated by LigaSure Surgery. Cells 2025, 14, 550. https://doi.org/10.3390/cells14070550
- Arturs Nikulins, Edgars Edelmers, Kaspars Sudars, Inese Polaka. 2025. "Adapting Classification Neural Network Architectures for Medical Image Segmentation Using Explainable AI" Journal of Imaging, 11(2): pp.55. https://doi.org/10.3390/jimaging11020055
- Ivars Namatevs, Kaspars Sudars, Arturs Nikulins, Kaspars Ozols. 2025. "Privacy Auditing in Differential Private Machine Learning: The Current Trends" Applied Sciences, 15(2): 647. https://doi.org/10.3390/app15020647
- Blaz Cugmas, Eva Štruc, Inese Bērziņa, Mindaugas Tamošiūnas, Laura Goldberga, Thierry Olivry, Kārlis Zviedris, Roberts Kadiķis, Maksims Ivanovs, Miran Bürmen, Peter Naglič. "Automated classification of pollens relevant to veterinary medicine" 2024 IEEE 14th International Conference Nanomaterials: Applications & Properties (NAP) https://ieeexplore.ieee.org/document/10739713
- Oskars Vismanis, Janis Arents, Jurga Subačiute-Žemaitieṅe, Vytautas Bučinskas, Andrius Dzedzickis, Brijesh Patel, Wei-Cheng Tung, Po-Ting Lin, Modris Greitans "A Vision-Based Micro-Manipulation System" Applied Sciences 13(24) http://dx.doi.org/10.3390/app132413248
- Peteris Racinskis , Oskars Vismanis , Toms Eduards Zinars , Janis Arents and Modris Greitans "Towards Open-Set NLP-Based Multi-Level Planning for Robotic Tasks" Applied Sciences, 14(22)L pp.10717. https://doi.org/10.3390/app142210717
- Edgars Edelmers, Dzintra Kazoka, Katrina Bolocko, Kaspars Sudars, Mara Pilmane, Automatization of CT Annotation: Combining AI Efficiency with Expert Precision
- Edīte Kaufmane, Edgars Edelmers, Kaspars Sudars, Ivars Namatēvs, Arturs Nikulins, Sarmīte Strautiņa, Ieva Kalniņa, Astile Peter. 2023. "Three-Dimensional Imaging in Agriculture: Challenges and Advancements in the Phenotyping of Japanese Quinces in Latvia", Horticulturae, 9(12): pp.16. https://www.mdpi.com/2311-7524/9/12/1347
- Andris Lapins, Janis Arents and Modris Greitans, "Augmenting a Pretrained Object Detection Model with Planar Pose Estimation Capability", Automatic Control and Computer Sciences, 57(5), pp. 459-468, https://link.springer.com/article/10.3103/S0146411623050061
- Ivars Namatēvs, Kaspars Sudars, Artūrs Ņikuļins, Anda Slaidiņa, Laura Neimane, Oskars Radziņš, "Towards Explainability of the Latent Space by Disentangled Representation Learning", Information Technology and Management Science
- Ivars Namatevs, Arturs Nikulins, Edgars Edelmers, Laura Neimane, Anda Slaidina, Oskars Radzins, Kaspars Sudars, "Modular Neural Networks for Osteoporosis Detection in Mandibular Cone-Beam Computed Tomography Scans",
- Kaspars Sudars, Ivars Namatevs, Arturs Nikulins, Edgars Edelmers, Laura Neimane, Anda Slaidina, Oskars Radzins, "Artificial Intelligence-Powered System for Identifying Bone Deterioration in Radiological Imaging", International Workshop on Embedded Digital Intelligence (IWoEDI'2023)
- Ivars Namatevs, Kaspars Sudars, Arturs Nikulins, Anda Slaidina, Laura Neimane, Oskars Radzins, Edgars Edelmers, "Denoising Diffusion Algorithm for Single Image Inplaine Super-Resolution in CBCT Scans of the Mandible", 023 IEEE 64th International Scientific Conference on Information Technology and Management Science of Riga Technical University (ITMS)
- Toms Eduards Zinars, Oskars Vismanis, Peteris Racinskis, Janis Arents, Modris Greitans. Natural Language Conditioned Planning of Complex Robotics Tasks. In: Advancing Edge Artificial Intelligence, River Publishers Series in Communications and Networking
- Maksims Ivanovs, Laura Leja, Kārlis Zviedris, Roberts Rimsa, Karina Narbute, Valerija Movcana, Felikss Rumnieks, Arnis Strods, Kevin Gillois, Gatis Mozolevskis, Arturs Abols, Roberts Kadikis. Synthetic Image Generation With a Fine-Tuned Latent Diffusion Model for Organ on Chip Cell Image Classification. Signal Processing - Algorithms, Architectures, Arrangements, and Applications Conference Proceedings, SPA
- Sajid Mohamed, Gijs van der Veen, Hans Kuppens, Matias Vierimaa, Tassos Kanellos, Henry Stoutjesdijk, Riccardo Masiero, Kalle Määttä, Jan Wytze van der Weit, Gabriel Ribeiro, Ansgar Bergmann, Davide Colombo, Javier Arenas, Alfie Keary, Martin Goubej, Benjamin Rouxel, Pekka Kilpeläinen, Roberts Kadikis, Mikel Armendia, Petr Blaha, Joep Stokkermans, Martin Čech, Arend-Jan Beltman. The IMOCO4.E reference framework for intelligent motion control systems. IEEE International Conference on Emerging Technologies and Factory Automation, ETFA, 2023.
- Kārlis Freivalds, Emīls Ozoliņš, Guntis Bārzdiņš. "Discrete Denoising Diffusion Approach to Integer Factorization" Proceedings of 32nd International Conference on Artificial Neural Networks 2023 , Lecture Notes in Computer Science (LNCS, volume 14254) Part I, pp. 123-134
- Zakovskis, R., Draguns, A., Gaile, E., Ozolins, E., Freivalds, K. (2023). Gates Are Not What You Need in RNNs. In: Rutkowski, L., Scherer, R., Korytkowski, M., Pedrycz, W., Tadeusiewicz, R., Zurada, J.M. (eds) Artificial Intelligence and Soft Computing. ICAISC 2023. Lecture Notes in Computer Science(), vol 14125. Springer, Cham. https://doi.org/10.1007/978-3-031-42505-9_27
- Kaspars Sudars, Ivars Namatevs, Arturs Nikulins, Rihards Balass, Astile Peter, Sarmite Strautina, Edite Kaufmane, Ieva Kalnina "Semantic Segmentation Using U-Net Deep Learning Network for Quince Phenotyping on RGB and HyperSpectral Images", 27th International Conference "Electronics" (2023). https://ieeexplore.ieee.org/document/10177638.
- M. Laizans, J. Arents, O. Vismanis, V. Bučinskas, A. Dzedzickis, and M. Greitans. 2023. "Supplementation of synthetic object replicas for increasing precision of microrobot trajectory keypoints" Robotic Systems and Applications, 3(1): pp47-58. https://www.extrica.com/article/23128, http://dx.doi.org/10.21595/rsa.2023.23128
- Oskars Vismanis, Janis Arents, Karlis Freivalds, Vaibhav Ahluwalia and Kaspars Ozols. 2023. "Robotic System for Post Office Package Handling" Applied Sciences 13(13 - Number) 7643 (Article Number), https://www.mdpi.com/2076-3417/13/13/7643
- Peteris Racinskis, Janis Arents, Modris Greitans. "Constructing Maps for Autonomous Robotics: An Introductory Conceptual Overview, 2023" Electronics 12(13): pp2925, https://www.mdpi.com/2079-9292/12/13/2925
- Vitalijs Fescenko, Janis Arents and Roberts Kadikis. 2023. "Synthetic Data Generation for Visual Detection of Flattened PET Bottles" Machine Learning and Knowledge Extraction 5(1), pp14-28. https://www.mdpi.com/2504-4990/5/1/2
- Peteris Racinskis, Janis Arents, Modris Greitans. 2023. (POSTER) Drone Detection and Localization using Low-Cost Microphone Arrays and Convolutional Neural Networks, 2023 19th International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT), pp.80-82.
- D. Duplevska, V. Medvedevs, D. Surmacs, A. Aboltins. 2023. "The Synthetic Data Application in the UAV Recognition Systems Development", Advances in Information, Electronic and Electrical Engineering (AIEEE).
- Kaspars Sudars, Ivars Namatēvs, Jānis Judvaitis, Rihards Balašs, Artūrs Ņikuļins, Astile Peter, Sarmīte Strautiņa, Edīte Kaufmane, Ieva Kalniņa. YOLOv5 Deep Neural Network for Quince and Raspberry Detection on RGB Images
- Edīte Kaufmane, Kaspars Sudars, Ivars Namatēvs, Ieva Kalniņa, Jānis Judvaitis, Rihards Balašs, Sarmīte Strautiņa. QuinceSet: Dataset of annotated Japanese quince images for object detection
- Ivars Namatēvs, Kaspars Sudars, Artis Dobrājs. Interpretability versus Explainability: Classification for Understanding Deep Learning Systems and Models.
- Ivars Namatēvs, Roberts Kadiķis, Anatolijs Zencovs, Laura Leja, Artis Dobrājs. Dataset of Annotated Virtual Detection Line for Road Traffic Monitoring
- Martin Cech, Ared-Jan Beltman, Kaspars Ozols. Digital Twins and AI in Smart Motion Control Applications
- Laura Leja, Vitālijs Purlans, Rihards Novickis, Andrejs Cvetkovs, Kaspars Ozols. Mathematical Model and Synthetic Data Generation for Infra-Red Sensors
- Diana Duplevska, Maksims Ivanovs, Janis Arents, Roberts Kadikis. Sim2Real image translation to improve a synthetic dataset for a bin picking task
- Racinskis, Peteris, Janis Arents, and Modris Greitans. 2022. "A Motion Capture and Imitation Learning Based Approach to Robot Control" Applied Sciences 12, no. 14: 7186. https://doi.org/10.3390/app12147186
- Arents, J., Lesser, B., Bizuns, A., Kadikis, R., Buls, E., Greitans, M. (2022). Synthetic Data of Randomly Piled, Similar Objects for Deep Learning-Based Object Detection. In: Sclaroff, S., Distante, C., Leo, M., Farinella, G.M., Tombari, F. (eds) Image Analysis and Processing – ICIAP 2022. ICIAP 2022. Lecture Notes in Computer Science, vol 13232. Springer, Cham. https://doi.org/10.1007/978-3-031-06430-2_59
- Torres, P.; Arents, J.; Marques, H.; Marques, P. Bin-Picking Solution for Randomly Placed Automotive Connectors Based on Machine Learning Techniques. Electronics 2022, 11, 476. https://doi.org/10.3390/electronics11030476
- Ivanovs, Maksims, Kaspars Ozols, Artis Dobrajs, and Roberts Kadikis. 2022. "Improving Semantic Segmentation of Urban Scenes for Self-Driving Cars with Synthetic Images" Sensors 22, no. 6: 2252. https://doi.org/10.3390/s22062252
- Janis Arents, Modris Greitans. 2022.g. "Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing" Applied Sciences 12, no. 2: 937. https://doi.org/10.3390/app12020937
- Sudars, Kaspars, Ivars Namatēvs, and Kaspars Ozols. 2022. "Improving Performance of the PRYSTINE Traffic Sign Classification by Using a Perturbation-Based Explainability Approach" Journal of Imaging 8, no. 2: 30. https://doi.org/10.3390/jimaging8020030
Nesenie patenti
Laboratorijas vadītājs

Laboratorijas darbinieki


Dr. sc. ing. Kaspars Ozols
Direktora vietnieks attīstības jautājumos, vadošais pētnieks
+371 67558161[protected]















